RM65 SERIES
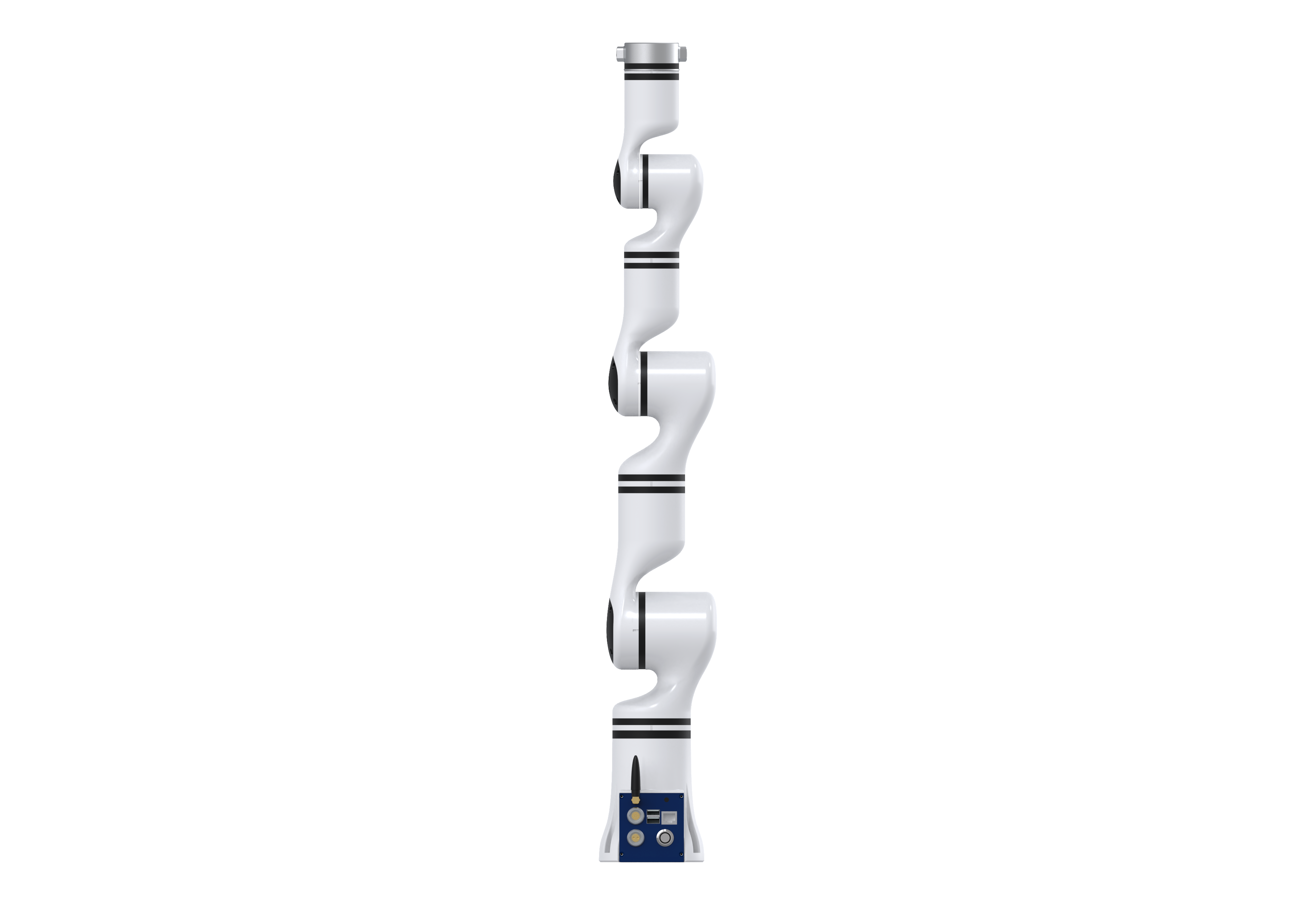
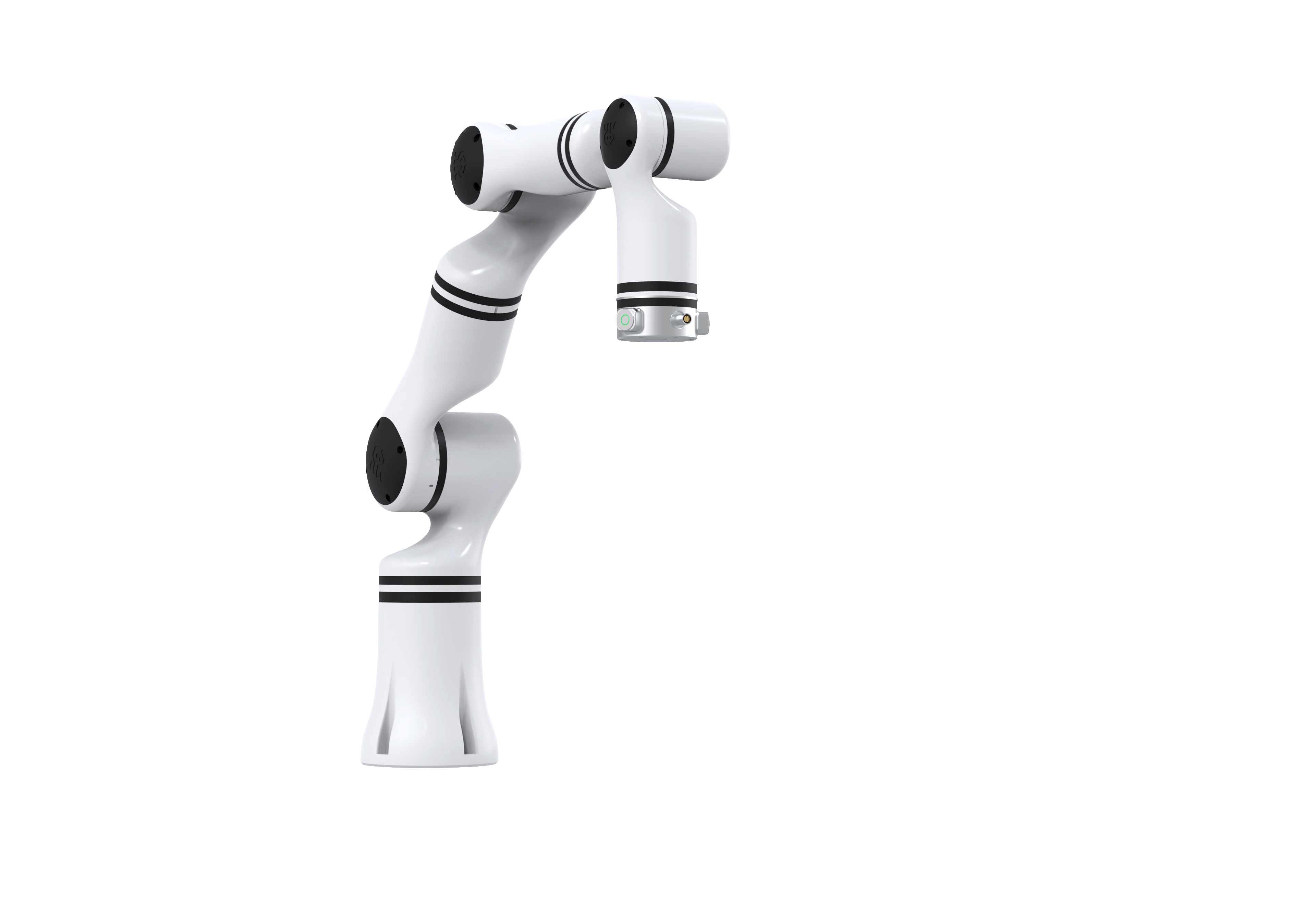
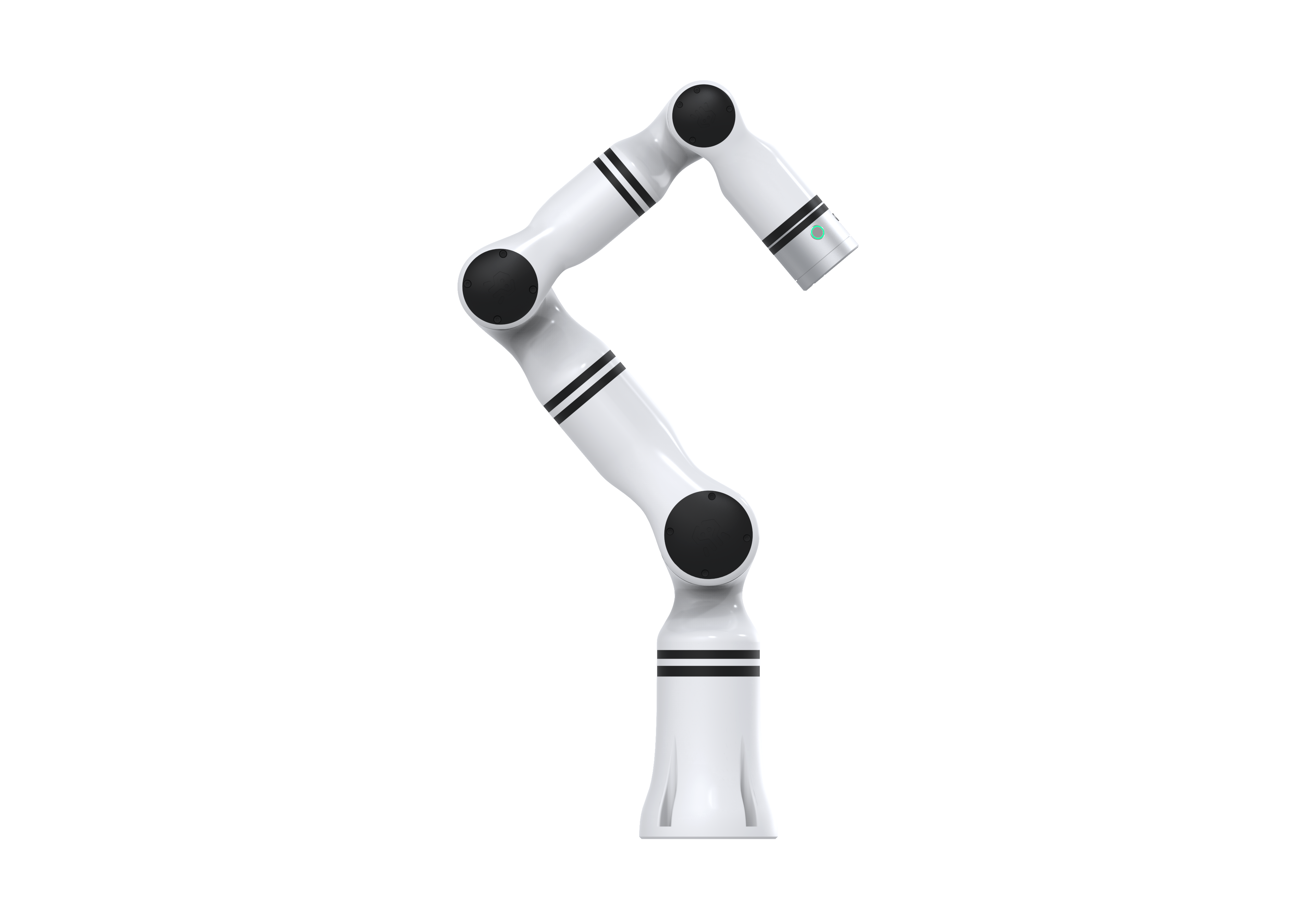
RM65 STANDARD
6-DOF · 5 KG · 610 MM REACH
STANDARD
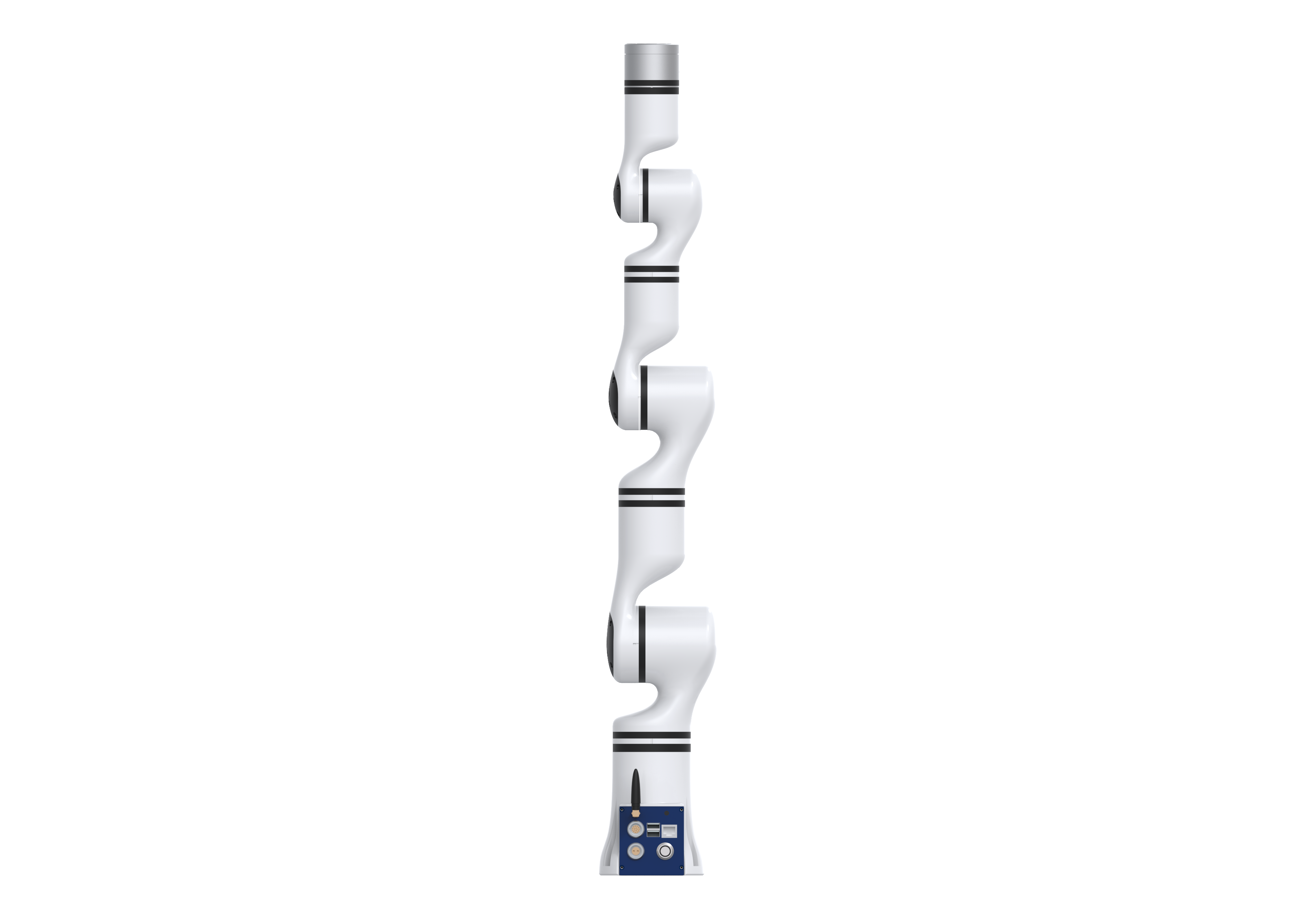
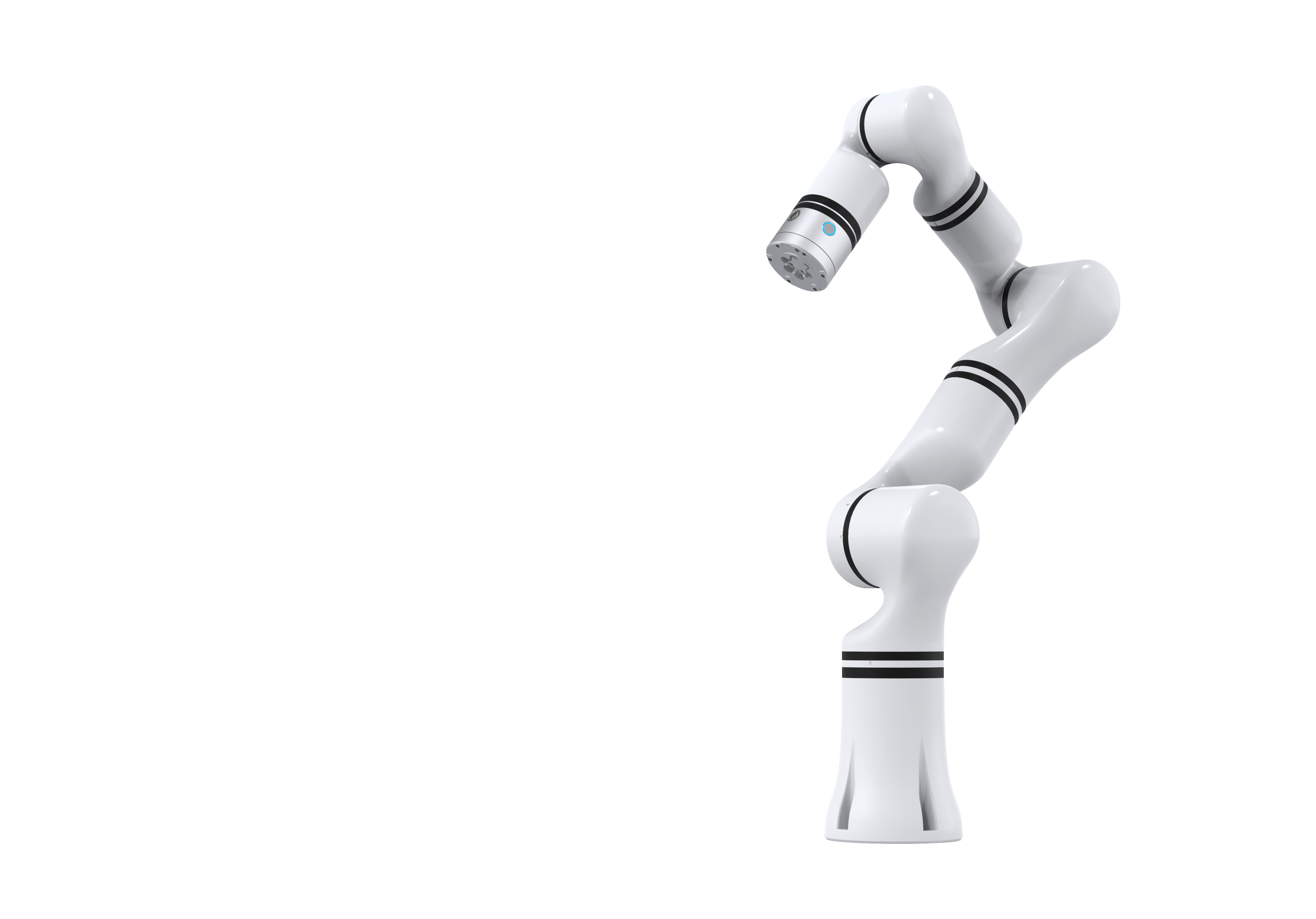
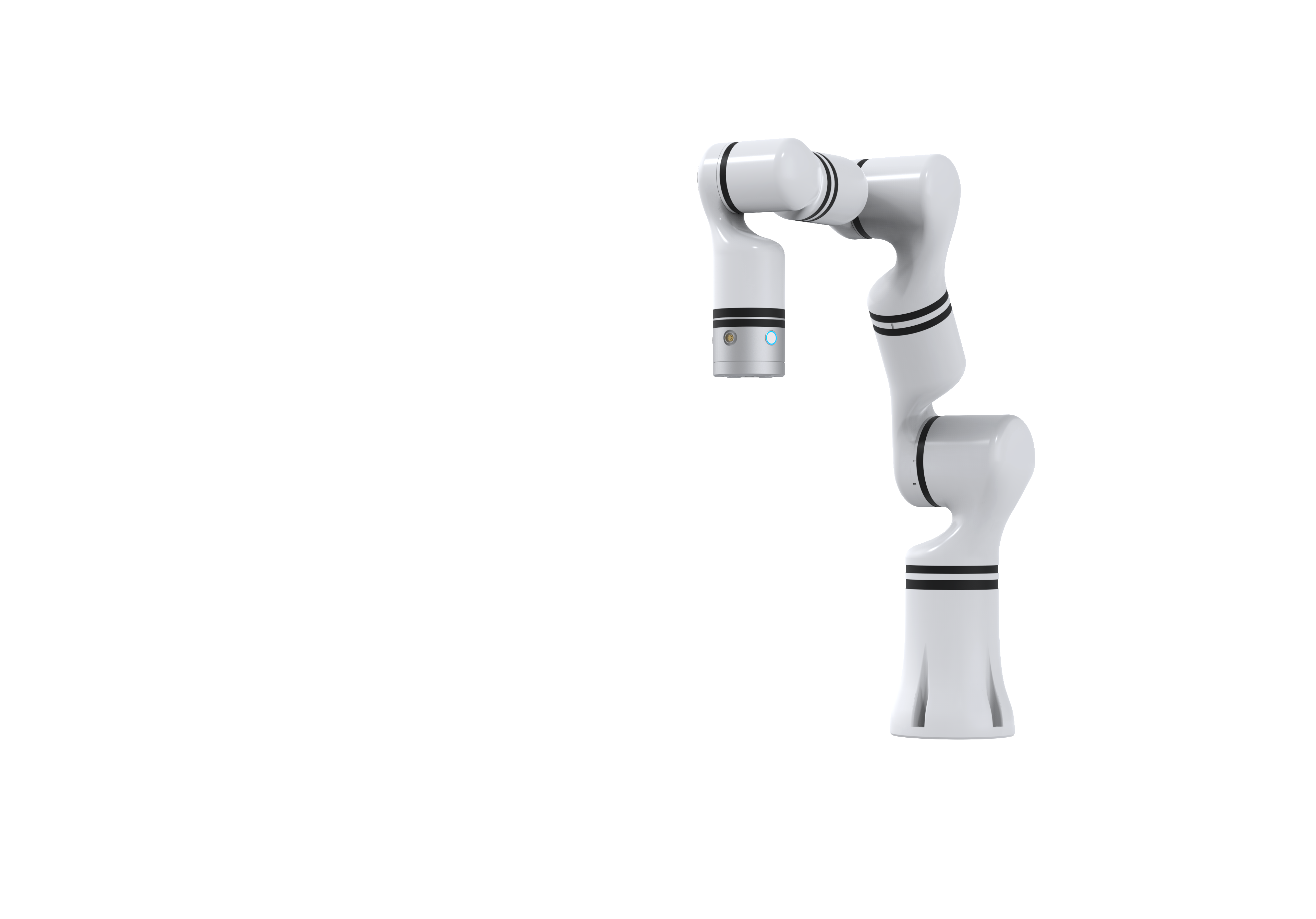
RM65 SIX-AXIS FORCE
6-DOF · 5 KG · 627 MM REACH · F/T SENSOR
SIX-AXIS FORCE
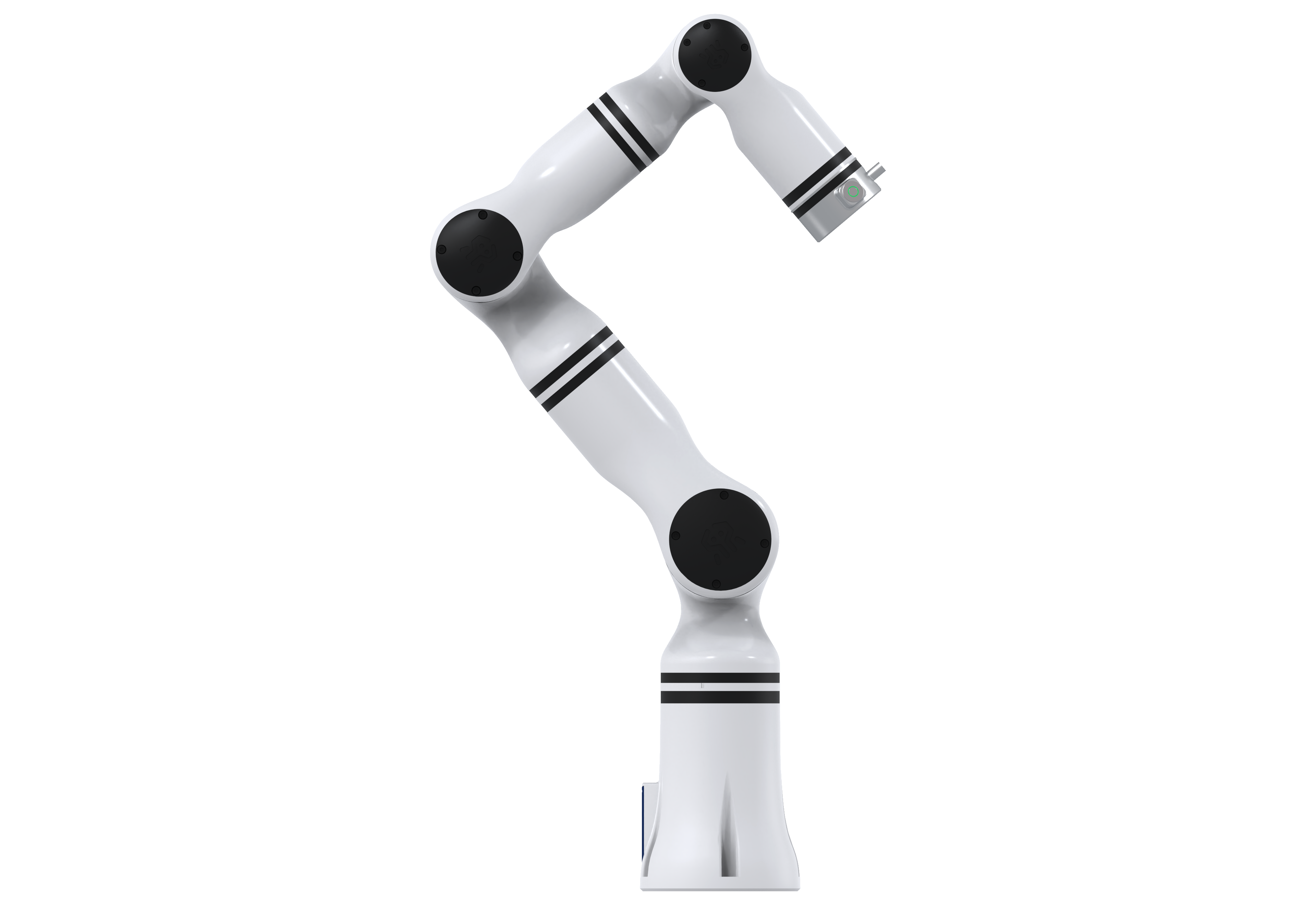
RM65 STANDARD VERSION

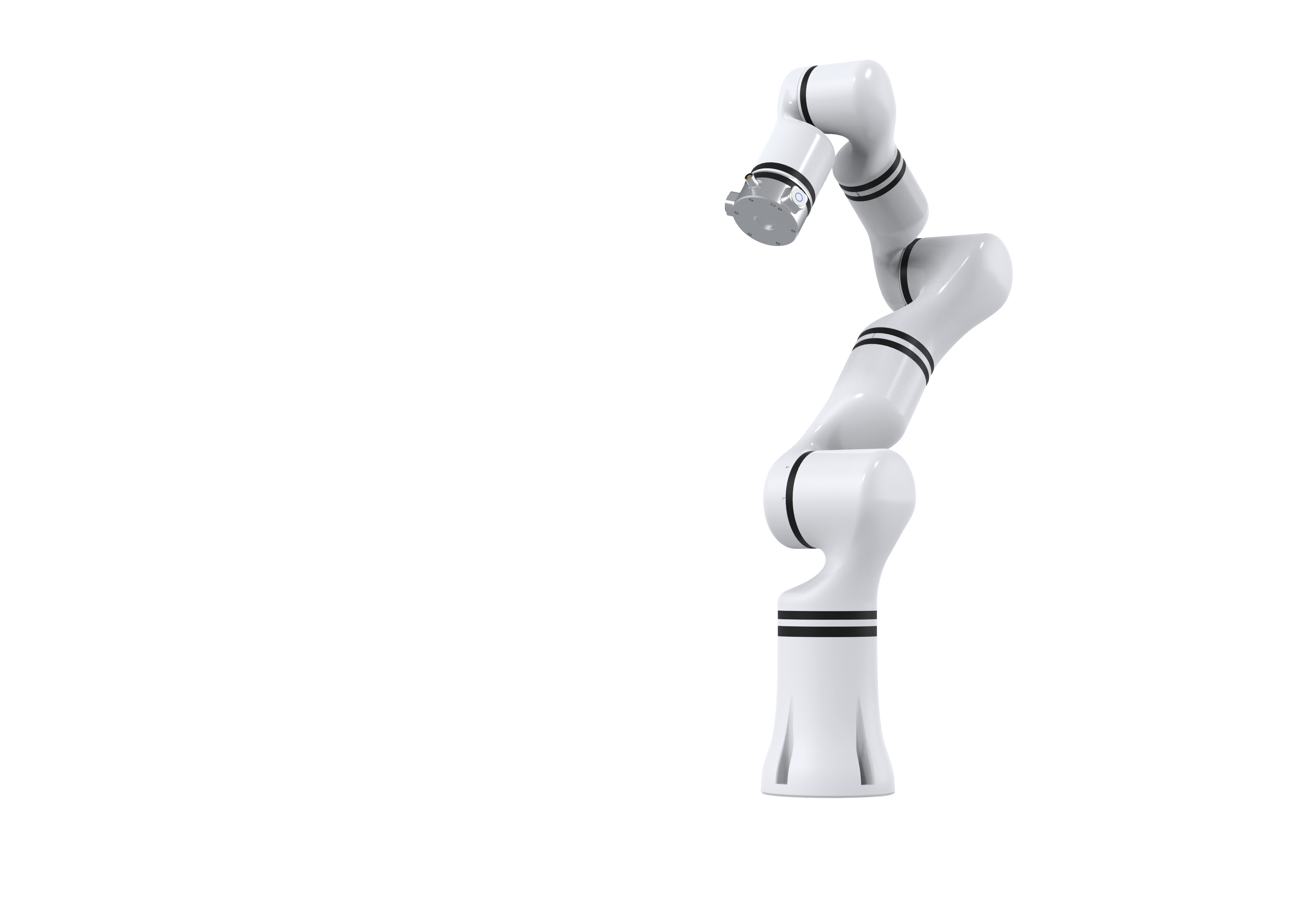
RM65 SIX-AXIS FORCE VERSION

Only 7.2 kg net weight with 5 kg payload capacity—industry-leading payload-to-weight ratio for flexible deployment.
6-DOF humanoid arm design with natural, flexible movements optimized for confined workspace operations.
Optional built-in six-axis force/torque sensor (200N / 7N·m, ±0.5%FS) for precision contact tasks.
±0.05 mm positioning repeatability with TCP speed up to 1.8 m/s for demanding precision applications.
Purpose-built for new retail, food & beverage, healthcare, education, and lifestyle service scenarios.